

 联系我们
联系我们

随着新一轮工业革命的兴起,市场对工业制品的要求不断提升,越来越多的制造工艺靠工业机器人传统的位置控制已难以胜任。
以打磨为例,现阶段的打磨去毛刺作业之所以难以摆脱人工来实现自动化,大的技术难点是需要精准的力度控制。工件打磨的精度和一致性较大程度上取决于打磨工具同工件接触面是否保持恒定压力,这就需要通过实时力控技术控制工业机器人打磨过程的磨削力。
力控的精度及反馈速度决定了产品的打磨效果。因此,机器人力控技术成为实现企业高效自动化打磨亟待解决的问题。
针对力控技术在机器人领域的发展与应用,本期技术破局云讲堂我们联合机器人附属产品和机械手臂工具的工程研发公司——ATI,推出“协作机器人安全与力控”的主题分享,由ATI高级应用工程师、资深力控专家、美国田纳西大学硕士苏哲担任主讲嘉宾。

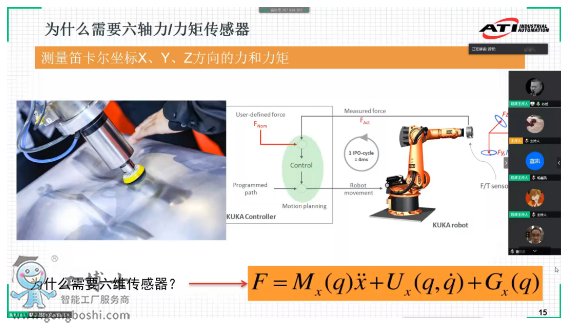
对一些简单的机器人应用,一维的传感器可能已经足够,但有一个非常重要的前提条件,就是机器人对于力的控制,方向必须是简单、轨迹必须是单一的。比如说打磨一条直线的焊缝,在一个平面上,这个时候它的运动方向其实只有一个自由度。而用户关心的,可能也只有压力到底有多大。
了解更多信息可点击咨询:遨博机器人服务商